## **Lab 6** | Intro to Rover Hardware and Actuation with ROS ### Design of Autonomous Systems ### CSCI 6907/4907 - Section 86 ### Prof. **Sibin Mohan** --- ## **Objectives** - Identify and understand key hardware components of the rover. - Install and configure a Raspberry Pi on the rover (Group Activity). - Implement actuation using ROS. --- ## **1. Introduction to Rover Hardware** The rover consists of essential hardware components enabling mobility, sensing, and computation. ### **Key Components** - **Raspberry Pi with Navio2 Shield** - Main computing unit. - **Electronic Speed Controller (ESC)** - Regulates motor power. - **Titan 550 Motor** - Provides propulsion. - **RealSense Camera** - Enables vision-based applications. - **Battery Pack** - Powers the entire system. - **Radio Transmitter (Radiomaster TX16S)** - Allows remote control. - **Wiring and Connectors** - Facilitate power and data flow. ### **Hardware Identification** Below are images of key components: #### **Electronic Speed Controller (ESC) Button** 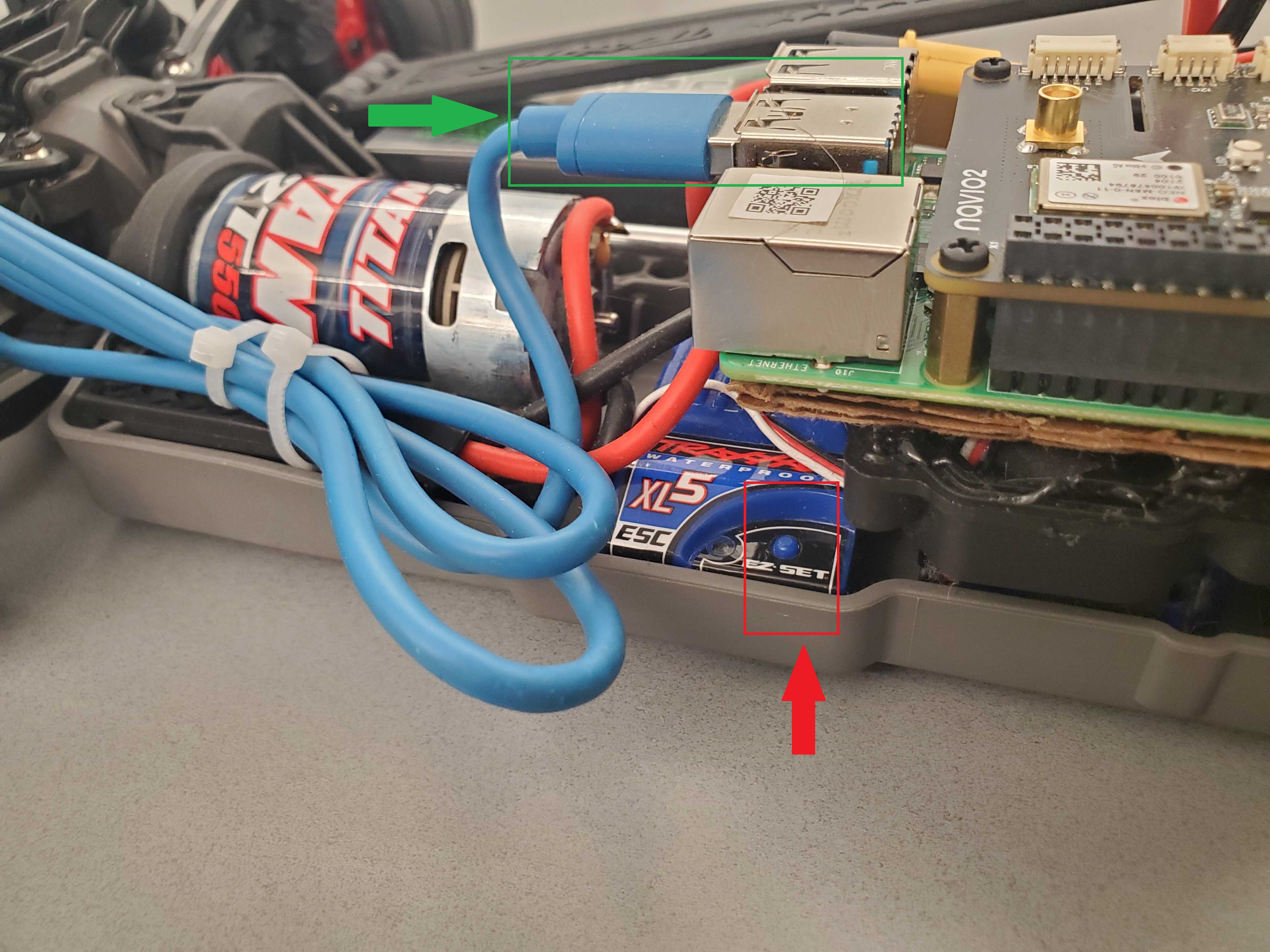 - **Highlighted Section:** Reset button for the ESC. #### **Radio Transmitter (Radiomaster TX16S)**  - **Green Box:** Switch SF - **Red Box:** Switch SG #### **Complete Rover Setup** 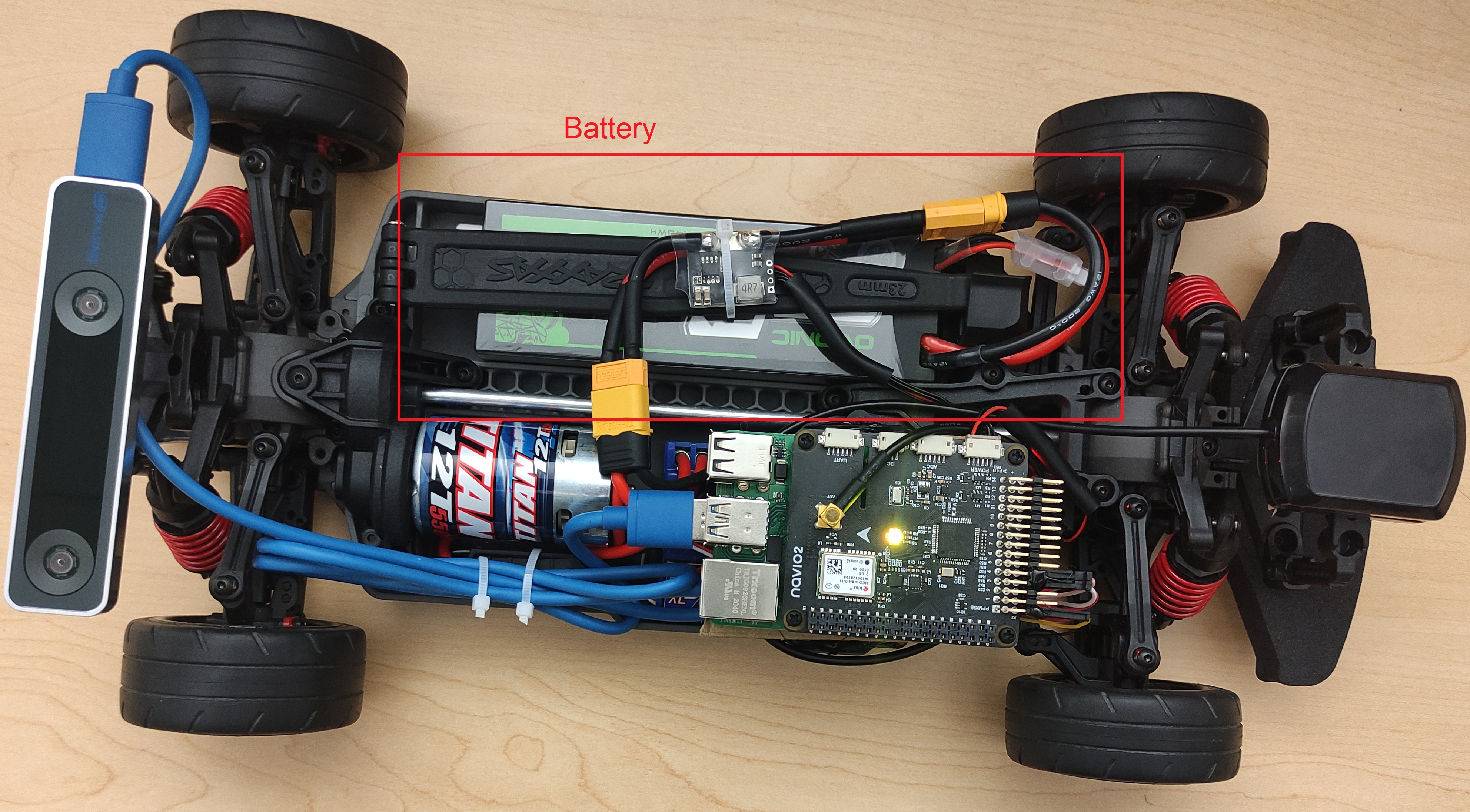 - **Red Box:** Battery Pack --- ## **2. Installing Raspberry Pi on the Rover (Group Activity)** ### **Installation Steps** 1. **Mount Raspberry Pi** on the rover chassis and secure it with spacers. 2. **Connect Power Supply** by attaching the battery module to the Raspberry Pi. 3. **Attach Sensors and Peripherals**, including the RealSense camera, ESC, and radio receiver. 4. **Verify Installation** by powering the system and checking sensor recognition using `lsusb` and `i2cdetect`. --- ## **3. Actuation with ROS** ### **Overview** Actuation involves sending commands from the Raspberry Pi to the ESC to control motor speed and direction. ### **Implementation Steps (Refer GitHub)** 1. **Install required ROS packages** for PWM control. 2. **Set up a ROS workspace and create a motor control package**. 3. **Develop a ROS publisher node** to send motor speed commands. 4. **Run and test the motor control node** to validate actuation. > **Refer to the GitHub repository for detailed setup, code, and execution instructions.** --- ## **4. Summary** - Identified and labeled key hardware components of the rover. - Installed and configured a Raspberry Pi onto the rover. - Implemented motor actuation using ROS. - Developed and tested a ROS-based motor control system. ---